一体化伺服电机PID的整定流程和判断依据
伺服PID整定的增益切换 一般应用场景:伺服锁轴增益和运行增益不一样。电机运行状态切换到较高增益,以获得更好的指令跟踪性能;电机静止(伺服使能)状态切换到较低增益,以抑制振动。增益切换的切换条件:根据增益切换模式选择(2009h:08h),具体切换条件如下: 0 ~固定使用第一组增益; 1 ~使用外部DI切换,DI无效为第1增益,DI有效为第2增益; 2 ~转矩指令,转矩指令的绝对值超过(等级+时滞)[%]的状态在延迟时间期间内持续时,切换到第二增益;转矩指令的绝对值不到(等级-时滞)[%]的状态在延迟时间的期间内持续时,返回到第一增益; 3 ~内部生效的速度指令值(606Bh)25ms维持不变固定使用第1增益,变化使用第2增益; 4 ~速度指令变化率,单位rpm/ms; 5 ~速度指令,单位rpm; 6 ~位置偏差,编码器单位 7 ~位置指令,位置偏指令不为0的状态在延迟时间期间内持续时,切换到第二增益;位置指令为0的状态在延迟时间的期间内持续时,返回到第一增益; 8 ~定位完成,定位未完成的状态在延迟时间期间内持续时,切换到第一增益;定位完成的状态在延迟时间的期间内持续时,返回到第二增益;除位置控制模式外,其余固定为第二增益; 9 ~实际速度,单位rpm 伺服PID整定的流程
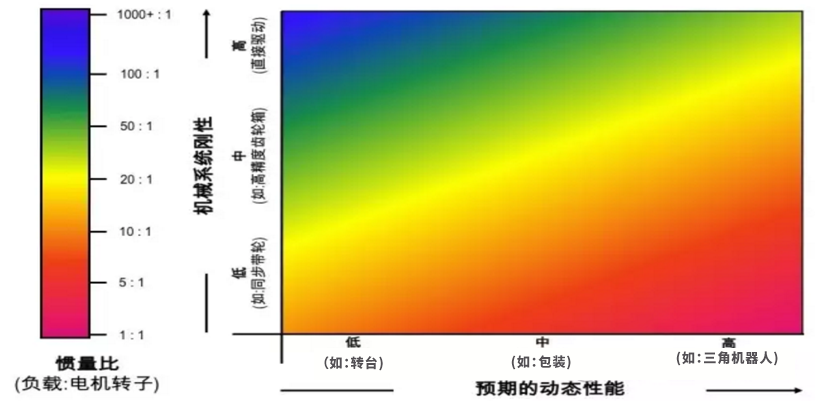
1. 设定合适的转动惯量比 2. 设定速度环积分时间常数为0 3. 加大速度环增益,如果机械振动,稍许调小 4. 先设定速度环积分时间常数为较大值,逐渐减小速度环积分时间常数,如果机械振动,稍许调大
伺服PID整定的判断依据
1. 伺服使能,用户手动正反转确定运行范围(建议最小半圈),然后确定运行方向(正-负,负-正,正-正,负-负)、移动量(1/2/4圈等),最大速度,加减速(1000/2000/4000rpm/s等)等。如果运行方向是单一方向,运行范围失效。 2. 点击开始按钮,电机按设定的运行方向和移动量运动,停止间隔2S左右(用于判断)。 3. 速度环积分时间常数(2008-02)设为0,慢慢增大速度环(2008-01)增益(50/100间隔)。
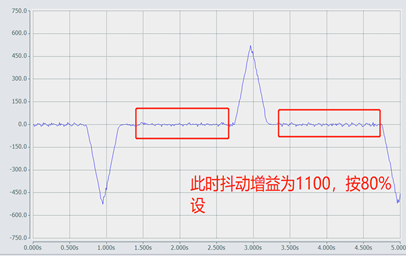
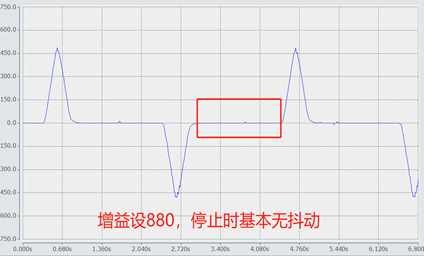
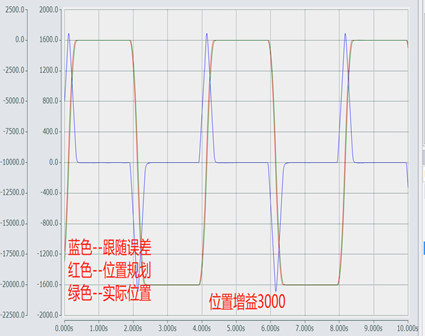
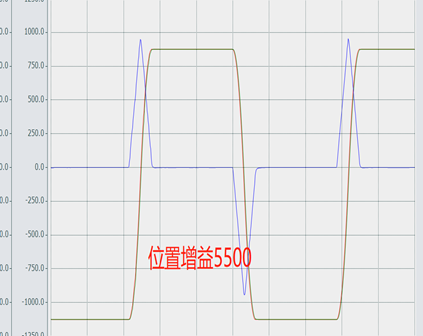
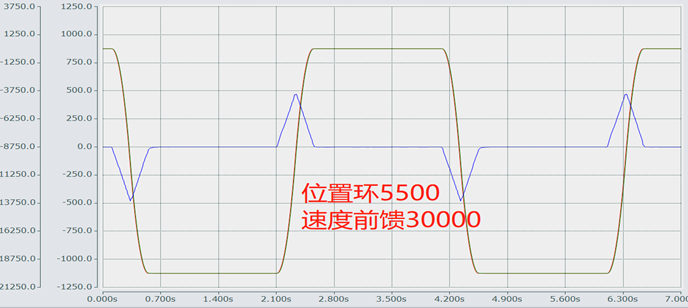
5. 位置环调试(速度环取880,1000)位置环增益(2008-03)逐渐增大(200/500间隔)
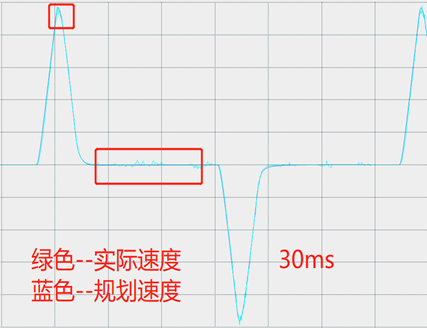
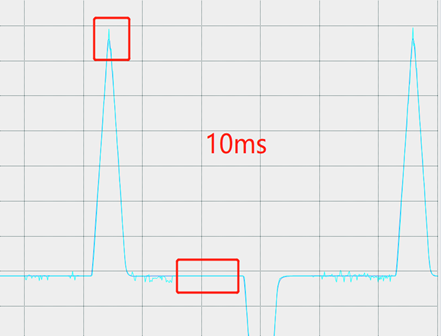
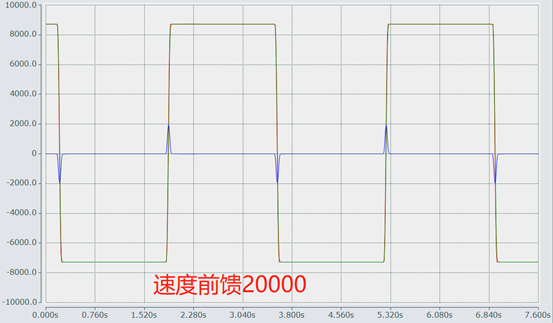
位置环增益根据实际跟随误差调整,如果加大位置环增益无明显改善,可以通过速度环前馈加以改善
|