常见参数问题解答 1、如何清零当前位置? 虚拟端子H2017-01=33(设置零点),H2017-02设置高电平有效;H2031-01先写1再写0; 2、如何清除历史报警? 虚拟端子H2017-01=38(清除故障历史),2017-02设置高电平有效;H2031-01先写1再写0; 3、如何保存当前参数? 在H1010-01写0x65766173; 4、电机电源低于24v时出现欠压报警如何调整? H2001-10直流母线电压欠压点(默认24V),设置实际所需电压;如实际电源电压20v,可将H2001-10设置为18v; 5、电源电压使用24v供电时参数无法设置保存? 当电机实际母线电压低于H2000-07(默认48v)额定电压的80%时,参数将无法设置保存;此时需要先用48v电源供电,再将H2000-07值修改为24v并保存,即可继续使用24v电源; 6、报警信息在哪个参数里面查看? 当前报警信息可查看H603F,当前设备报警数量可查看H1003-00,历史报警可查看H1003-01—H1003-10; 7、如何恢复为出厂参数? 在H1011-01写0x64616F6C; 8、电机IO线端子对应定义? 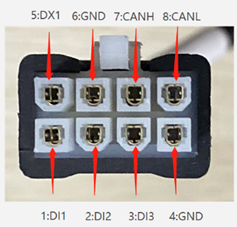 9、刹车电机多少伏供电? 直流24v供电; 10、通讯线RJ45头对应的线序是什么? 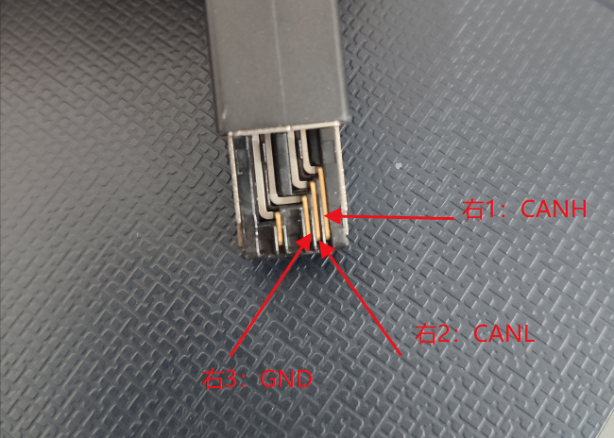 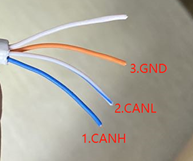 11、电机一圈多少脉冲? 电机一圈脉冲为10000; 12、电机如何暂停并使能? 控制字的第8位置1;因为不同的模式控制字不同,所以对应暂停的指令不同;如PV模式下:控制字给10F; 13、电机运行到65536停止且无报警的原因? 受软限位607D-01/02限制,设大此参数; 14、当前速度是哪个参数? 读H6069用户单位/s,H603C rpm; 15、当前位置读哪个参数? 读H6063、H6064; 16、电机的PID如何调? 速度环增益H2008-01默认值500,适当增加此参数; 速度环积分时间常数H2008-02默认值800,适当减小此参数; 位置环增益H2008-03默认值1500,适当增加此参数; 运动过程中调节参数,可根据速度/位置波动范围进行调节; 17、外接制动电阻线如何接? 外接制动电阻的两根线,其中一根接到电机的制动电阻线上,另一根接到电机48V正极上; 18、电机报警时DO是否可以正常控制动作? 报警,分两种,一个是触发故障报警位,一种是不触发故障报警位的(不需要清清除故障报警的);上电、正常通讯情况下,两种报警状态下都能控制动作,不考虑状态机; 19、使用NIMstudio,控制电机在单轴控制台里出现导入PDO配置文件提示? 如图,在硬件配置中点击“从文件中恢复PDO参数”,选择ConfigFile后,对应通讯方式选择配置文件; 电机每次断电后再使用,需要重新再恢复配置,不改变PDO的话不恢复文件也不影响电机使用;  20、状态字读哪个参数? 状态字读H6041; 21、输入输出口的状态读哪个参数? 200B-05输入信号监视,200B-06输出信号监视; 22、外接限位开关停机的机制是什么样的? 外接限位开关时,正限位开关、负限位开关的正负是相对于零点的,在零点的正方向接正限位开关生效,在零点的负方向接负限位开关生效; 23、脉冲+方向控制电机如何配置? 伺服厂家位置模式脉冲+方向控制 1. 在2002:01中选择厂家位置模式 2. 在2005:01位置信息来源选0-脉冲
3. 设置端子功能 ①2003:03=42,脉冲输入(固定DI1) 2003:04=0,低电平有效 ②2003:05=43,脉冲输入方向(固定DI2) 2003:06=0,低电平有效 ③2003:07=1,电机使能(DI3) 2003:08=0,低电平有效
4. 运行 ④电机使能DI3输入低电平(DI3+信号地+I0地) ⑤DI1给脉冲信号;DI3+IO地+信号地运行;DI2+(DI3、I0地、信号地)改变电机方向 使用外部脉冲模式200C-01设置外部脉冲模式 24、原点回归NPN、PNP光电配置使用 1. 原点回归方式17(负限位开关NPN) 机械原点:负限位开关 ① 模式设置 2002:01=0,选择402模式;6060=0x06,选择原点回归模式; ② IO端子设置 2003:03=15,反向超程开关;2003:04=0,低电平有效(注:NPN 接常闭输出为高电平有效); ③ 回零方式及速度设置 6098=17,负限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); ④ 硬件接线 NPN 光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO口地+24v电源地,常开输出+IO口DI0; ⑤ 运行 6060h=0x06→0x07→0x0F→0x1F 电机按照原点回归方式17开始回零; 注:NPN光电开关需设置上拉使能;2003—15默认7 2. 原点回归方式17 (负限位开关PNP) 机械原点:负限位开关 ①模式设置 2002:01=0,选择 402模式; 6060=0x06,选择原点回归模式 ② IO端子设置 2003:03=15,反向超程开关; 2003:04=0,低电平有效(注: PNP接常闭输出为高电平有效); ③ 回零方式及速度设置 6098=17,负限位开关; 6099:01=10000(用户单位/s),找限位开关速度; 6099:02=1000(用户单位/s),找原点信号速度; 609A=200000(用户单位/s*2); ④硬件接线 PNP 光电开关(正极、负极、常开输出、常闭输出); 正极+24v,负极+IO 口地+24v 电源地,常开输出+IO口 DI0; ⑤运行 6060h=0x06→0x07→0xOF→0x1F 电机按照原点回归方式17开始回零; 注: PNP光电开关需下拉对应设置; 2003—15=0 25、CANOPEN运动报文举例 1. 轮廓位置模式运行报文 601 2B 02 20 01 00 00 00 00 //切换到402模式; 601 2F 60 60 00 01 00 00 00 //切换到轮廓位置模式; 601 23 7A 60 00 A0 86 01 00 //正转10圈; 601 23 7A 60 00 60 79 FE FF //反转10圈; 601 2B 40 60 00 06 00 00 00 //先发控制字06; 601 2B 40 60 00 07 00 00 00 //再发控制字07; 601 2B 40 60 00 5F 00 00 00 //再发5F,电机相对位置运行; 601 2B 40 60 00 02 00 00 00 //急停; 2. 轮廓速度模式运行报文 601 2B 02 20 01 00 00 00 00 //切换到402模式; 601 2F 60 60 00 03 00 00 00 //切换到轮廓速度模式; 601 23 FF 60 00 0C FE FF FF //设置目标速度-500; 601 23 FF 60 00 F4 01 00 00 //设置目标速度 500; 601 2B 40 60 00 06 00 00 00 //先发控制字 06; 601 2B 40 60 00 07 00 00 00 //再发控制字 07; 601 2B 40 60 00 0F 00 00 00 //电机运行; 601 2B 40 60 00 02 00 00 00 //急停; |
