PMM60一体化伺服电机 | ||
| PMM系列一体化伺服电机基于高度紧凑的一体化开发理念,集稀土永磁同步电机、绝对值编码器、总线型伺服驱动器、数字量 I/O于一体,采用FOC磁场定向控制技术和驱控一体技术。
| |
特点 ● 200/400功率 ● 支持EtherCAT/CANopen/Modbus总线控制 ● 多种控制模式 ● 16段位置/速度功能&S型曲线规划 ● 通过陷波器进行共振抑制 ● 低频震动抑制 ● 支持在线升级和多平台开发
| ||

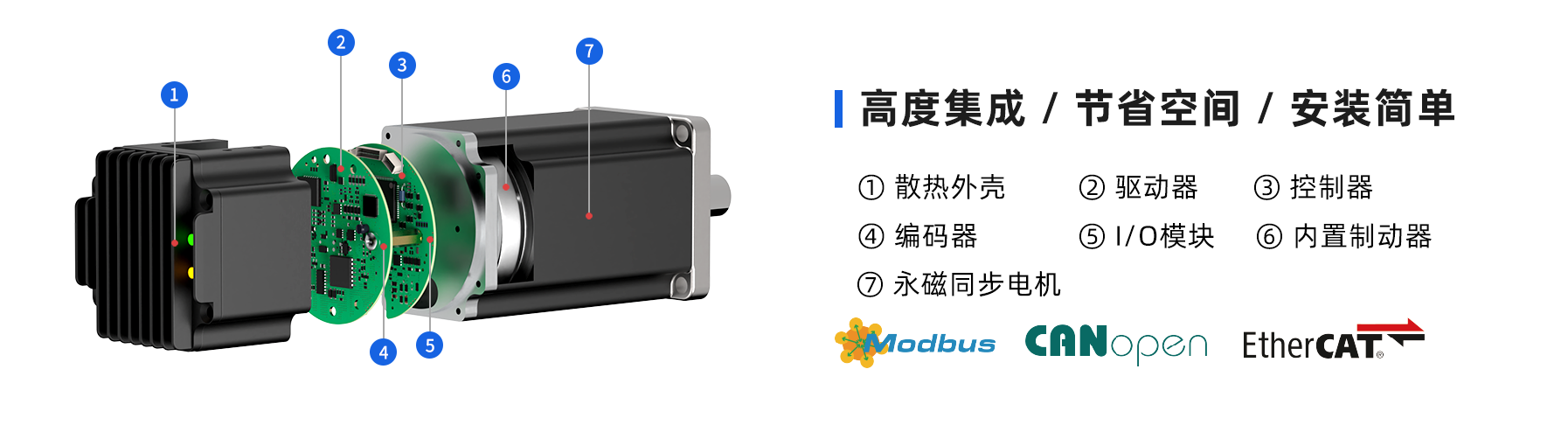
| 结构示意图 |
|
 | 技术规格 | ||||||||
| 型号 | 额定电压(V) | 额定电流(A) | 额定转速(rpm) | 额定扭矩(N·m) | 额定功率(W) | 惯量(kg.m²×10-5) | 机身长度(mm) | 重量(Kg) | |
| PMM6020B | 48V | 8 | 3000 | 0.64 | 200 | 1.9 | 115 | 1.4 | |
| PMM6020B-LP | |||||||||
| PMM6020B-B | 147 | 2.0 | |||||||
| PMM6020B-B-LP | |||||||||
| PMM6040B | 12 | 1.27 | 400 | 2.5 | 145 | 1.6 | |||
| PMM6040B-LP | |||||||||
| PMM6040B-B | 177 | 2.2 | |||||||
| PMM6040B-B-LP | |||||||||
※注:可选CANopen、EtherCAT、RS485通信方式,-B表示刹车型号,LP表示航插接口;轴径(mm):Φ14,制动器静扭矩≥1.3N·m。 部分参数可能会随产品更新发生细微变化,最终产品参数请以产品说明书为准。 | |||||||||
| 技术参数 | |
| 电压范围 | • 16VDC~52VDC | |
| LED指示灯 | • 黄绿双色显示 | |
| 编码器 | • 2500线编码器 | |
| 控制模式 | • CIA402模式:PP、VM、PV、PT、HM、IP、CSP、CSV、CST • NiMotion模式:速度模式、位置模式、转矩模式 | |
| 数字量输入/输出(DI/DO) | • DI:数量3个;不隔离;高电平时3~30V,低电平时0~0.5V; 通过设置对象2003h:15h配置上拉 可配置功能:作为开关使用;作为脉冲输入通道使用 • DX(可配置为DI或DO):数量1个, 配置为DO:最大负载电流8mA 可配置功能:1. 普通DO口;2. 电机运行停止;3. 目标达到;4. 报警输出 | |
| 模拟量输入(AI) | • 数量:1个;输入方式:单端输入;信号种类:电压信号; 分辨率:12bit;电压:0~10V;精度:引用误差≤1% • 可配置功能:死区、滤波、偏置、倍率、方向 | |
| 通信方式 | • EtherCAT、CANopen、RS485 | |
| 驱动方式 | • 采用FOC磁场定向控制技术和SVPWM(空间矢量调制技术) | |
| 故障诊断/复位 | • 过压、欠压、过温、堵转、存储故障、超限检测、跟踪故障、目标位置溢出故障、曲线规划参数过小等故障 • 报警为自复位,故障为手动复位 | |
| 制动电阻 | • 内置:25W • 外置:通过电源线X1引脚3进行配置,外置和内置不可并联使用; 可接制动器,与外置制动电阻功能不可同时使用 | |
| 工作环境 | • 温度:0~40°C • 湿度:相对湿度10%RH~85%RH • 安装环境:无腐蚀性气体,易燃物、油雾,无强震动 • 海拔高度:-300m~3000m • 安装方式:水平或垂直 | |
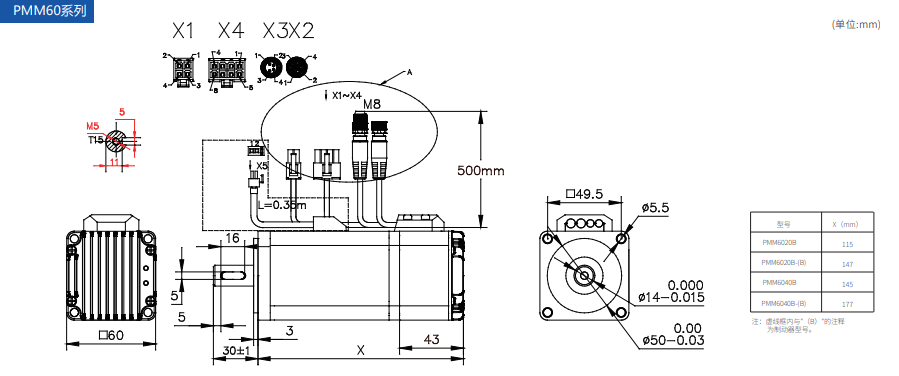
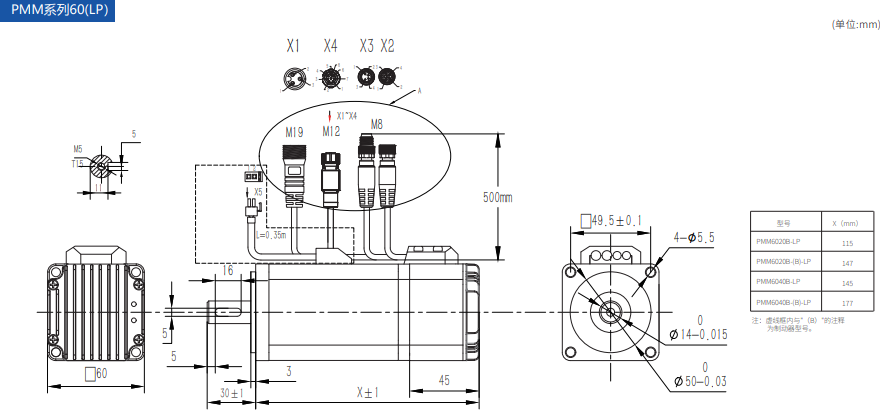
| 外形尺寸 |
|
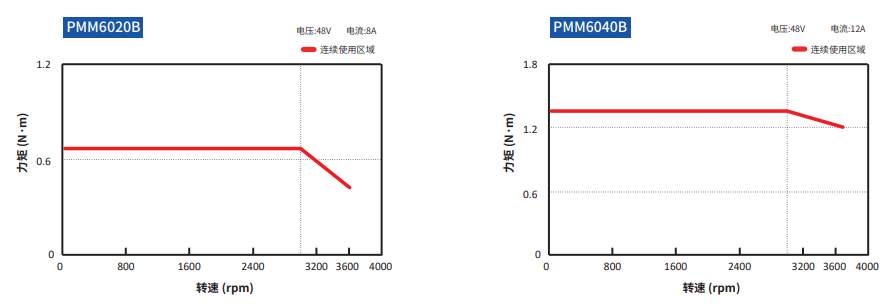
| 转矩——转速特性 |
|