NIMC2400N-L 运动控制器(自主PLC软件平台) | ||
 | NIMC2400N-L整合了自主PLC控制平台;集PLC功能与运动控制功能于同一硬件设备中;该控制器支持PLC多种编程方式、逻辑控制功能及多种运动控制算法。 NIMC2400N-L具有EtherCAT主站、MODBUS、CANopen等多种现代工业现场总线接口,性能强大的ARM64 Cortex-A55四核处理器,支持复杂的数据处理、实时计算等,适用于现代工业中复杂、多变、以及苛刻的用户需求,为您提供可扩展、简洁、经济而且先进的解决方案。 | |
特点● ARM64 Cortex-A55 四核处理器 ● NIMCS2000(立迈胜自主PLC) ● 支持MODBUS、CANopen、EtherCAT等总线扩展 ● 支持标准PLC的编程语言,简单易用 | ||

 | 硬件规格 | |
| 硬件规格/硬件型号 | NIMC2400N-L | |
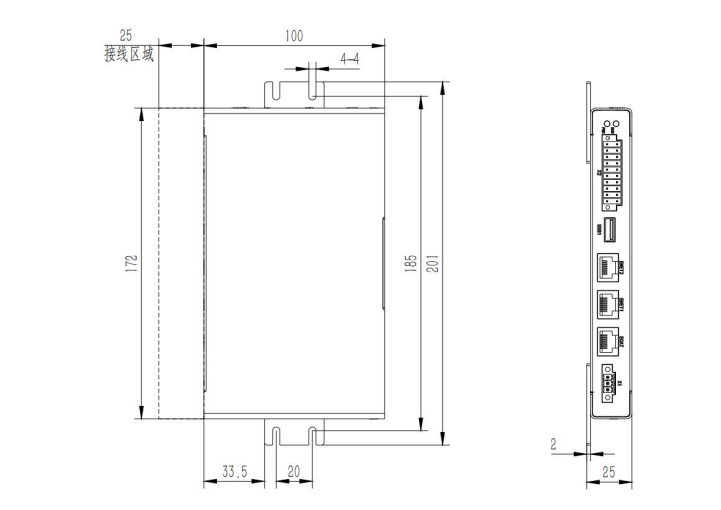
| 外形尺寸 | 172 X 100 X 25mm | |
| 安装方式 | 导轨安装、 螺丝安装 | |
| 重量 | 450g | |
| 外壳材质 | 镀锌冷板(CGCC) | |
| 电源要求 | ||
| 额定电压/电压范围 | 24/48 VDC (10~52VDC) | |
| 内部功耗 | 6W@24VDC | |
| 最大输入电流 | 3A(包括内部消耗电流+控制器输出电源外接负载消耗电流) | |
| 保险丝 | 内置直流可恢复保险丝 | |
| 硬件配置 | ||
| 处理器 | ARM64 Cortex-A55 四核 512KB L3-cache 2.0GHz | |
| 内存 | 2GB | |
| 闪存 | 16GB eMMC | |
| 通信端口 | ||
| RS232端口数量 | 2路, 非隔离 | |
| RS485端口数量 | 2路, 隔离 | |
| CAN端口数量 | 2路, 隔离 | |
| 以太网端口数量 | 3 | |
| Type-C端口数量 | 1 | |
| USB端口数量 | 1 | |
| 环境 | ||
| SD卡 | 支持 | |
| 工作温度 | 0℃~+55℃ | |
| 环境温度 | -25℃~+70℃ | |
| 湿度 | 5%~85%RH 无冷凝 | |
| 软件规格 | |
| 软件规格产品型号 | NIMC2400N-L | |
| 操作系统 | Debian 11.8 | |
| 系统内核 | Linux 4.9.45 + Xenomai3实时补丁 | |
| PLC软件 | NIMCS2000(立迈胜自主PLC) | |
| 编程语言 | ||
| 结构化文本ST | √ | |
| 梯形图LD | √ | |
| 顺序流程图SFC | √ | |
| 功能块图FBD | √ | |
| 通信协议 | ||
| Modbus RTU主、 从 | √ | |
| Modbus TCP主、 从 | √ | |
| CANopen 主、 从 | 仅支持CANopen 主站 | |
| EtherCAT主站 | √ | |
| 运动控制库 | ||
| NiM_SML | √ | |
| NiM_SMB | √ | |
| 运动控制库介绍 | |
| NiM_SML | 立迈胜自研轻量单轴运动控制库 | |
| NiM_SMB | 立迈胜自研标准单轴运动控制库 支持CANopen通信、EtherCAT通信的Cia402轴 支持循环同步位置CSP、循环同步速度CSV两种控制模式 控制器进行速度规划,每个控制周期将规划的位置/速度发生给电机, 相较于NiM_SML控制器CPU负荷、总线负荷都较大 支持位置控制、速度控制、点动、运动叠加,支持电子齿轮、电子凸轮同步 | |
| 外观图纸 |
|