低频振动产生的原因 伺服电机驱动机械负载时,机械的刚性与结构、间隙、轴中心的偏移、多惯性负载场合等都会引起电机振动,导致设备精度降低。 由惯性力引起的装置的振动,其振动频率一般小于100Hz,这种振动称之为低频振动。 常具备以下特点: 1. 机械的刚性较差,容易在负载末端产生振动 2. 频率高、速度快、加速时间要求短 3. 运动方向改变时,产生的惯性冲击 传统的解决振动抑制的方法 1. 低通滤波器: ① 主要用于抑制高频振动的场合,适用振动频率范围为1KHz以上; ② 可使伺服控制系统的高频响应发生衰减, 来实现抑制振动; ③ 缺点是限制了伺服系统的带宽,造成可用于调谐的增益系数变小。 2. 陷波器: ① 主要用于共振抑制(某个频率点与机械的共振频率相同)的场合,适用振动频率范围为100Hz~1KHz; ② 对特定频率的信号有着很强的衰减的滤波器,也即阻带带宽较窄的带阻滤波器; ③ 优势在于其能保留伺服系统的高频响应,能安全地获得调谐增益; 但当机器在100 Hz以下的频率产生振动时, 传统振动抑制方法发挥的作用却很小。 那么该如何解决这一问题呢?答案是使用主动抑振先进技术。 什么是主动抑振技术? 1. 属于一种前馈开环控制技术; 2. 实质是将整形器的零点和柔性系统的极点对消,从根本上避免激发对象的振动模态来消除残留振动; 3. 实现形式简单,不需要额外的测量装置; 4. 所付出的代价是系统运动响应时间的延迟,约为1个振动周期。 主动抑振的实现原理
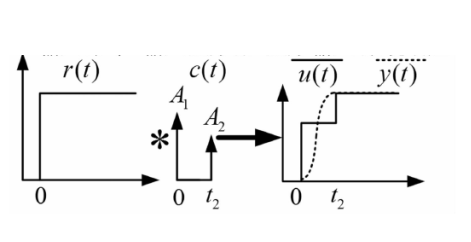
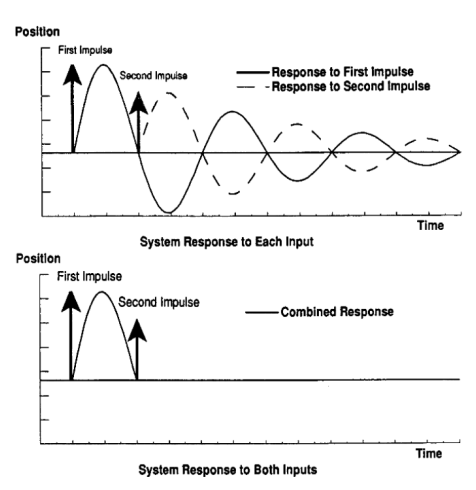
1. 由一系列脉冲序列与一定的期望输入相卷积,所形成的指令作为控制系统运动的输入。 2. 需要根据振动系统的频率和阻尼比来设计脉冲序列。
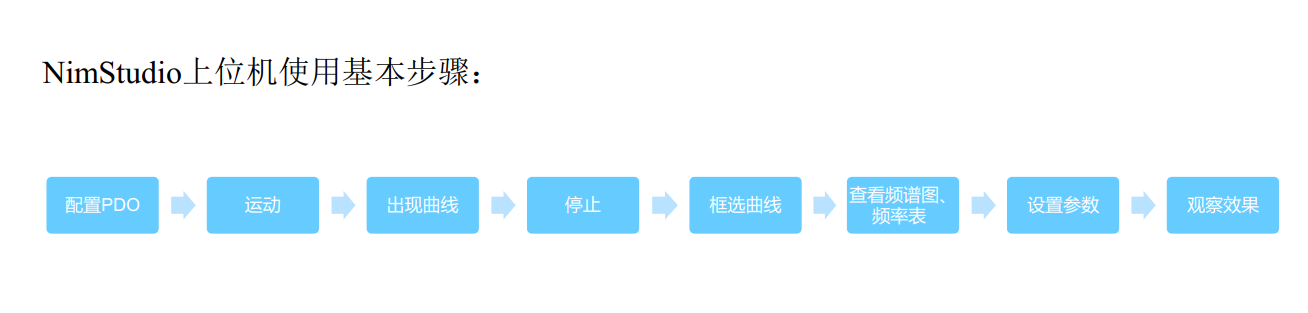
NimStudio上位机设置后,振动抑制效果展示: |