STM42M一体化步进伺服电机 | ||
| STM42M一体化步进伺服电机是高性能小功率的步进伺服产品。凭借其优秀的闭环控制系统和一体化开发理念,集成步进电机、编码器、驱动器于一体,采用FOC磁场定向控制技术,支持CANopen和485总线控制,具有体积小,接线简单的特点。 | |
特点● 集成高精度编码器 ● 高效的原点返回与设定 ● 集成数字量输入输出 ● 多种控制模式 ● 16段位置/速度功能&S型曲线规划 ● 通过陷波器进行共振抑制/低频振动抑制 ● 支持多平台软件开发工具包(SDK)
| ||

| 结构示意图 |
 |
 | 技术规格 | |||||||
| 型号 | 额定电压(VDC) | 额定电流(A) | 保持力矩(N·m) | 步距角(°) | 相数 | 机身长度(mm) | 重量(kg) | |
|---|---|---|---|---|---|---|---|---|
| STM4234B-CANopen-M | 24 | 1.3 | 0.28 | 1.8 | 2相 | 52.5(51.5) | 0.27 | |
| STM4234B-485-M | 1.3 | 0.28 | 52.5(51.5) | 0.27 | ||||
| STM4234B-CANopen-M-B | 1.3 | 0.28 | 84.5(82.5) | 0.46 | ||||
| STM4234B-485-M-B | 1.3 | 0.28 | 84.5(82.5) | 0.46 | ||||
| STM4240B-CANopen-M | 1.7 | 0.40 | 58.5(57.5) | 0.33 | ||||
| STM4240B-485-M | 1.7 | 0.40 | 58.5(57.5) | 0.33 | ||||
| STM4240B-CANopen-M-B | 1.7 | 0.40 | 90.5(88.5) | 0.52 | ||||
| STM4240B-485-M-B | 1.7 | 0.40 | 90.5(88.5) | 0.52 | ||||
| STM4248B-CANopen-M | 1.7 | 0.50 | 66.5(65.5) | 0.41 | ||||
| STM4248B-485-M | 1.7 | 0.50 | 66.5(65.5) | 0.41 | ||||
| STM4248B-CANopen-M-B | 1.7 | 0.50 | 98.5(96.5) | 0.60 | ||||
| STM4248B-485-M-B | 1.7 | 0.50 | 98.5(96.5) | 0.60 | ||||
| STM4260B-CANopen-M | 2.0 | 0.70 | 78.5(77.5) | 0.52 | ||||
| STM4260B-485-M | 2.0 | 0.70 | 78.5(77.5) | 0.52 | ||||
| STM4260B-CANopen-M-B | 2.0 | 0.70 | 109.5(107.5) | 0.71 | ||||
| STM4260B-485-M-B | 2.0 | 0.70 | 109.5(107.5) | 0.71 | ||||
| ※注:支持CANopen、RS485通信方式,-B表示刹车型号,轴径:Φ5,制动器保持力矩0.65 N·m;()括号内尺寸为防撞结构版本长度尺寸 | ||||||||
| 技术参数 | |
| 输入电压 | • 12VDC~36VDC | |
| LED指示灯 | • 黄绿双色显示 | |
| 编码器 | • 2500线编码器 | |
| 控制模式 | • CIA402模式:PP(轮廓位置模式)、VM(速度模式)、PV(轮廓速度模式)、PT(轮廓转矩模式)、HM(原点回归模式)、IP(插补模式)、CSP(循环同步位置模式)、CSV(循环同步速度模式)、CST(循环同步转矩模式) • NiMotion模式:NiMotion速度模式、 NiMotion位置模式、NiMotion转矩模式 | |
| 通信方式 | • CANopen、Modbus | |
| 数字量输入/输出(DI/ | • DI:数量3个,最大 PWM 脉冲频率 2MHz,逻辑 1 信号:5 或 24V;逻辑 0 信号:0~2V 可配置功能: 1.使能 2.正负限位 3.原点开关 4. 报警复位 5.暂停 6. 多段运行指令切换 • DO:数量2个,输出方式:MOS集电极开漏输出,最大负载电流 100mA,最大电压 30V可配置功能: 1.电机运行停止; 2.目标到达; 3.报警输出 | |
| 模拟量输入(AI) | • 数量:1个;输入方式:单端输入;信号种类:电压信号 • 分辨率:12bit;电压:0~10V;引用误差≤1% • 可配置功能:死区、滤波、偏置、倍率、方向 | |
| 控制频率 | • 1KHz位置环,2KHz速度环,20KHz电流环 | |
| 驱动方式 | • 采用FOC磁场定向控制技术和SVPWM(Space Vector PWM,空间矢量脉宽调制) | |
| 故障诊断/复位 | • 过压、欠压、过温、堵转、存储故障、超限检测、原跟踪故障、目标位置溢出故障、曲线规划参数过小等 • 报警为自复位,故障为手动复位 | |
| 工作环境 | • 温度0℃~40℃ • 相对湿度10%RH~85%RH • 海拔高度:≤1000m • 安装环境:无腐蚀性气体、易燃物、油雾等,无强震动 • 安装方式:水平或垂直 | |
| 外形尺寸 |
|


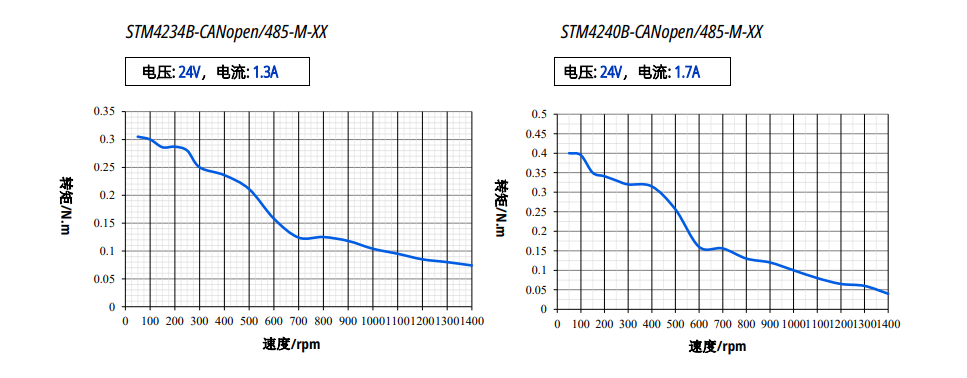
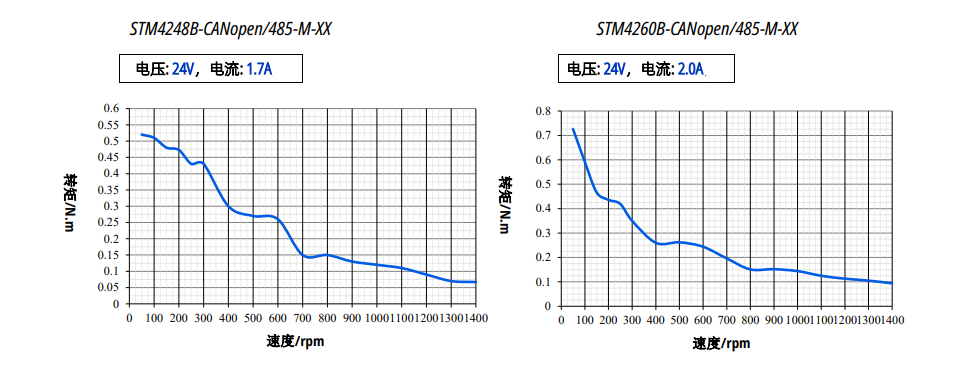
| 转矩——转速特性 |
|