PMM60-L一体化伺服电机 | ||
| PMM60L系列一体化伺服电机是一款低惯量短款伺服产品,基于高度紧凑的一体化开发理念,集稀土永磁同步电机、绝对值编码器、总线型伺服驱动器、数字
量I/O于一体,采用FOC磁场定向控制技术和驱控一体技术。支持EtherCAT/CANopen总线型伺服控制,具有体积小、接线简单的特点。
| |
特点 ● 集成单圈高精度编码器 ● 集成数字量输入输出 ● 多种控制模式 ● 16段位置/速度功能&S型曲线规划 ● 通过陷波器进行共振抑制 ● 低频震动抑制 ● 支持在线升级和多平台开发 | ||

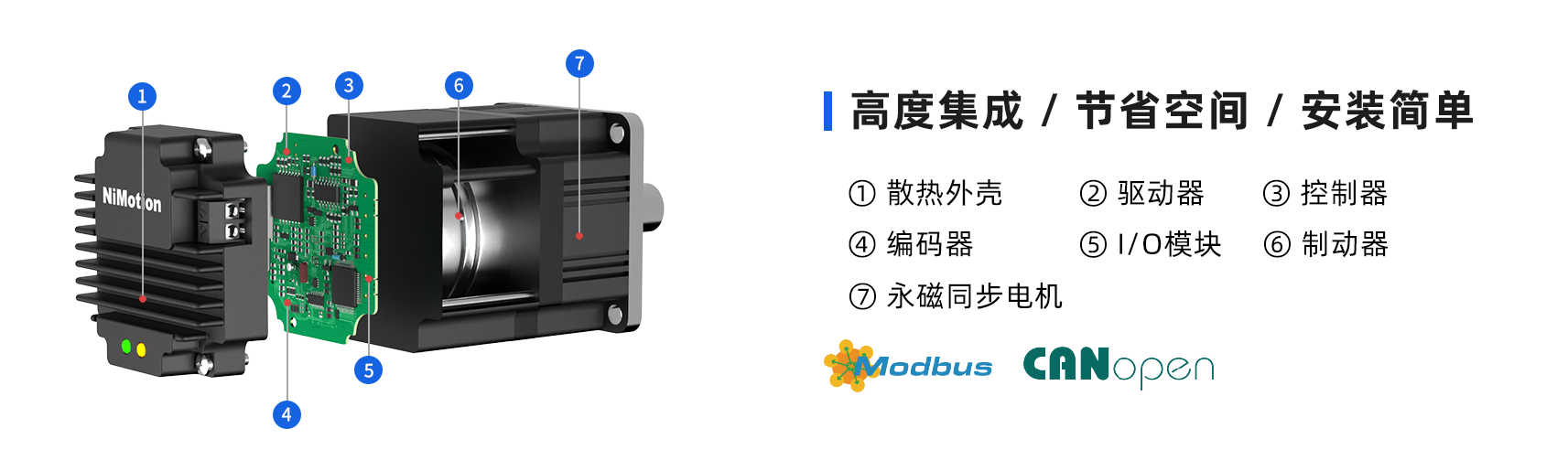
| 结构示意图 |
|
 | 技术规格 | |||||||||
| 型号 | 额定功率(W) | 额定转速(rpm) | 额定力矩(N·m) | 制动器保持力矩(N·m) | 额定电压(V) | 额定电流(A) | 惯量(kg.m²×10-6) | 机身长度(mm) | 重量(Kg) | |
| PMM6020B-CANopen-L | 200 | 3000 | 0.637 | ≥1.3 | 48V | 5.98 | 9.1 | 56.5 | 0.6 | |
| PMM6020B-485-L | 56.5 | 0.6 | ||||||||
| PMM6020B-CANopen-L-B | 89 | 1.0 | ||||||||
| PMM6020B-485-L-B | 89 | 1.0 | ||||||||
| ※注:支持CANopen、RS485通信方式,-B表示刹车型号,轴径(mm):Φ14,制动器保持力矩≥1.3N·m | ||||||||||
| 技术参数 | |
| 电压范围 | • 16VDC~52VDC(72V可定制) | |
| 纹波噪声 | • <240mV | |
| 功率 | • 200W | |
| LED指示灯 | • 黄绿双色显示 | |
| 编码器 | • 2500线编码器 | |
| 控制模式 | • CIA402模式:PP、VM、PV、PT、HM、IP、CSP、CSV、CST • NiMotion模式:速度模式、位置模式、转矩模式 | |
| 驱动方式 | • 采用FOC磁场定向控制技术和SVPWM(空间矢量调制技术) | |
| 制动电阻 | • 内置+外置,且二者不可并联使用,内置16W,外置制动电阻可通过配置实体端子的EXTERNAL_BRAKE功能实现 | |
| 通信方式 | • CANopen、Modbus | |
| 数字量I/O | • 数量:3个 ,均采用高速双向光耦,最大PWM脉冲频率2MHz ,可以连接外部直流电源:12~24V;可配置功能: 作为开关使用; 作为脉冲输入通道使用 • 数量 1 个,MOS 开漏输出,2A@52V 可配置功能:普通 DO 口/电机运行停止/目标到达/报警输出 | |
| 数字量输入可配置功能 | • 伺服使能、报警复位、正限位开关、负限位开关、原点开关、清除故障历史、步进量使能、正交脉冲、占空比及方向信号、脉冲及方向信号等 | |
| 模拟量输入AI | • 数量: 1 个; 输入方式: 单端输入; 信号种类: 电压信号; 分辨率: 12bit; 电压: 0-10V;精度:引用误差≤1% • 可配置功能: 死区、 滤波、 偏置、 倍率、 方向 | |
| S型曲线规划 | • 支持两个冲击量可设的S型曲线 | |
| 故障诊断/复位 | • 过压欠压过温堵转存储故障超限检测跟踪故障目标位置溢出故障曲线规划参数过小等故障 • 报警为自复位,故障为手动复位 | |
| 使用环境条件 | • 温度:0~40°C • 湿度:90%RH以下(无凝露) • 环境:远离腐蚀,可燃性气体,油滴,灰尘 • 最高海拔4000m,1000m以上,每升高100m,功率下降1.5% | |
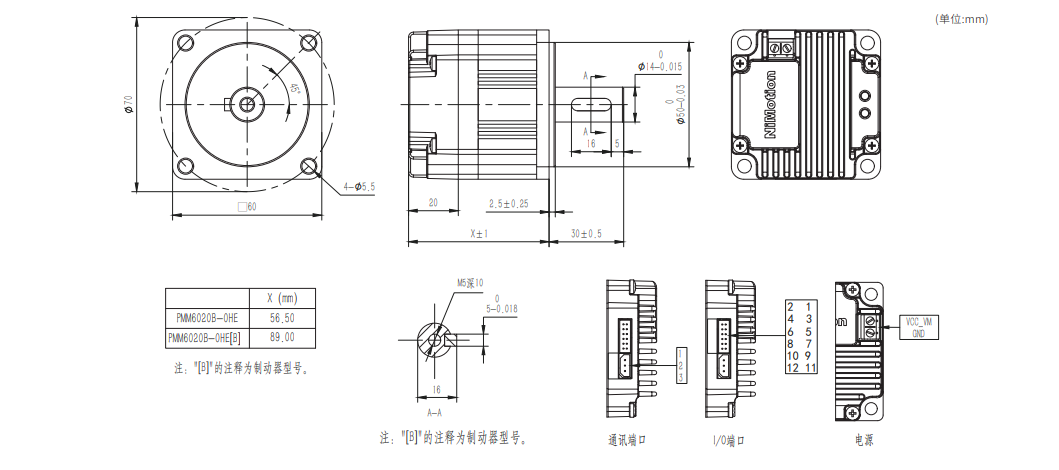
| 外形尺寸 |
|
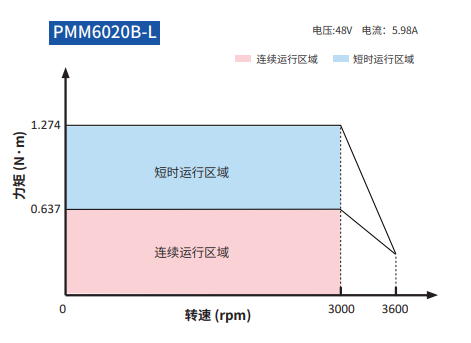
| 转矩——转速特性 |
|