PMMP40L一体化低压伺服电机 | ||
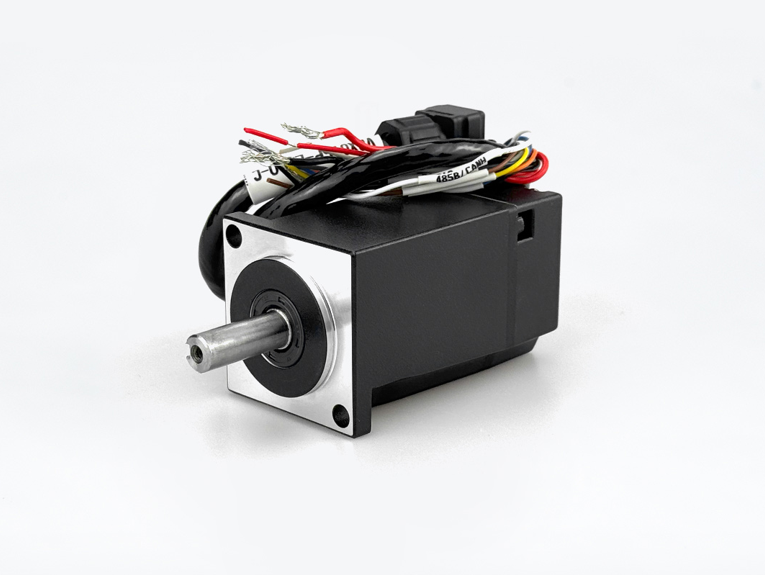
| PMMP40L 系列 CANopen&RS485 通信一体化防水低压伺服电机是我司自主研制的防水低压伺服产品。本产品基于高度集成的一体化开发理念,集永磁同步电机、磁编码器、伺服驱动器和控制器于一体,采用 FOC 磁场定向控制技术和驱控一体技术,支持 CANopen 和 RS485 通信总线控制,具有体积小,接线简单、防护等级 IP65 等特点。 | |
特点 ● IP65防护等级 ● 集成数字量输入输出 ● 多种控制模式 ● 16段位置/速度功能&S型曲线规划 ● 通过陷波器进行共振抑制 ● 低频震动抑制 | ||

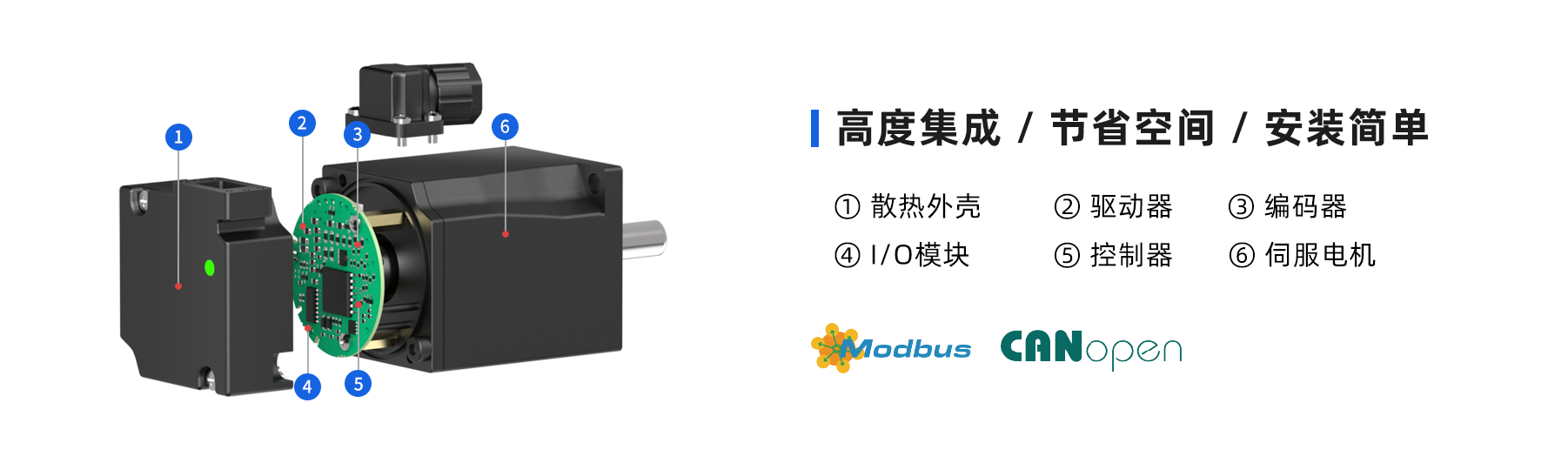
| 结构示意图 |
|
 | 技术规格 | ||||||||
| 型号 | 功率(W) | 额定转速(rpm) | 额定扭矩(N·m) | 额定电压(V) | 额定电流(A) | 惯量(kg.m²×10-6) | 机身长度(mm) | 重量(Kg) | |
| PMMP4010B-485-L | 100 | 3000 | 0.32 | 24V | 6.5 | 6.2 | 67.7 | 0.43 | |
| PMMP4010B-CANopen-L | 100 | 3000 | 0.32 | 24V | 6.5 | 6.2 | 67.7 | 0.43 | |
| ※注:可选CANopen、RS485通信方式,轴径(mm):Φ8 | |||||||||
| 技术参数 | |
| 电压范围 | • 12VDC~52VDC | |
| 防护等级 | • IP65 | |
| LED指示灯 | • 黄绿双色显示 | |
| 编码器 | • 17 位磁编码器 | |
| 控制模式 | • CiA402:模式支持轮廓位置模式( PP)、速度模式(VM)、轮廓速度模式(PV)、轮廓转矩模式(PT)、原点回归模式(HM)、插补模式(IP)、循环同步位置模式(CSP)、循环同步速度模式(CSV)、循环同步转矩模式(CST) | |
| 驱动方式 | • 采用FOC磁场定向控制技术和SVPWM(空间矢量调制技术) | |
| 故障检测和保护 | • 过压、欠压、过温、硬件故障堵转、过载超速、初始化故障、存储故障、超限检测、原点回归超时、跟踪故障、目标位置溢出故障、曲线规划参数过小等故障 • 报警为自复位,故障为手动复位 | |
| 通信协议 | • CANopen、Modbus RTU(RS485) | |
| 数字量输入/输出(DI/DO) | • DI:数量3 个;不隔离,通过设置对象 2003h:15h 配置上拉;高电平时 12~24V,低电平时 0~0.5V 可配置功能:作为开关使用; • DO:数量 1 个, 最大负载电流:0.5A 可配置功能:1.普通 DO 口;2.电机运行停止;3.目标到达;4.报警输出 | |
| 制动电阻 | • 内置 15Ω/25W | |
| 使用环境条件 | • 温度:0~40°C • 湿度:10%~85%RH • 环境:无腐蚀性气体、易燃物、油雾等,无强震动 • 海拔高度:-300~3000m • 安装方式:水平或垂直 | |
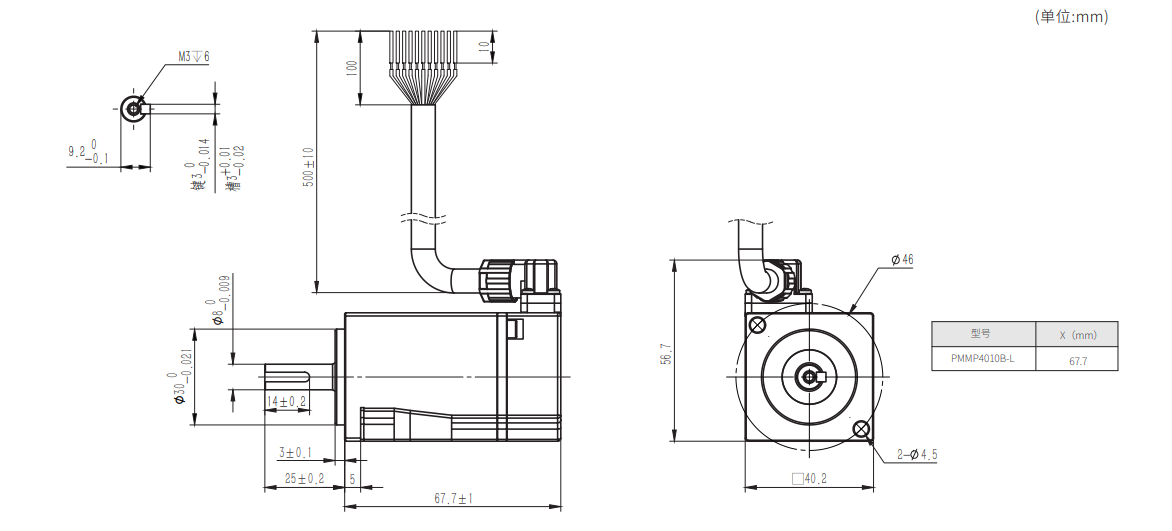
| 外形尺寸 |
|
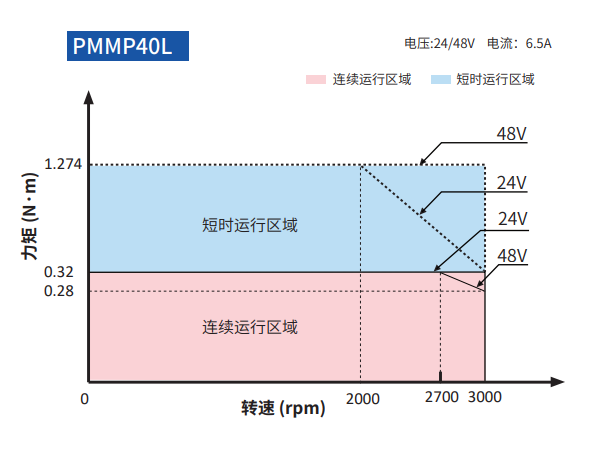
| 转矩——转速特性 |
|